Analyze OMERO timelapse images using the TrackMate API
In this example we open an image stored in an OMERO server and use the TrackMate API to analyze it. One of the advantages of this approach over the User interface workflow is that the generated track can be saved as OMERO ROIs.
Description
First, we will show how to use the TrackMate API and the Scripting editor of Fiji.
We will show:
How to connect to OMERO using the JAVA API.
How to retrieve an image.
How to open the image using Bio-Formats.
How to create a TrackMate model using its API.
How to save the tracks as polygon ROIs in OMERO.
Setup
Install Fiji on the local machine with the OMERO.insight-ij plugin, version 5.5.10 or higher. The installation instructions can be found at here.
Resources
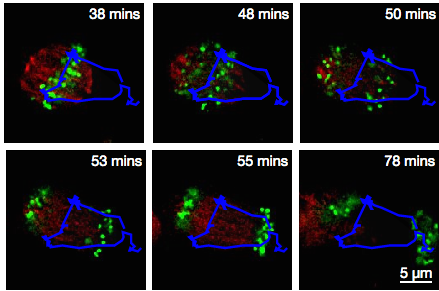
We will use a timelapse image available at DV/iain/438CTR
Script: Groovy script for tracking timelapse images -
tracking.groovy.
Step-by-Step
In this section, we go through the steps required to analyze the data.
The script used in this document is tracking.groovy. The script follows similar steps than the ones used via the User Interface, see Analyze OMERO timelapse images using the TrackMate User Interface.
One advantage of the scripting approach is that we can save the generated tracks as ROIs in an OMERO server.
Launch Fiji.
Open
File > New > Script....Select
Groovyas a language.Copy the content of
tracking.groovyin the text area.A dialog will pop up. Enter the credentials to connect to the server and select an Image. If you are not using websockets i.e. no
wssin front of the host name, the port value needs to be changed to4064.Click Run.
Go back to OMERO.web to visualize the tracks. Double-click on the image in OMERO.web to open it in OMERO.iviewer.
Click on the ROI tab and observe that you now have ROIs under which there are Shapes. Each ROI is a collection of shapes. The ROI corresponds to a track in Trackmate. There is always one polyline shape in each ROI which represents the track. The other, elliptical shapes in the same ROI represent the tracked spots.
Play the timelapse video in OMERO.iviewer.
Go to the Info tab, and in the Open with: line click on OMERO.figure. In OMERO.figure, add the Tracks and ellipses to the panel by selecting the appropriate ROIs in the Labels tab of OMERO.figure.
Script’s description
Import packages needed:
import java.awt.Color
import java.util.ArrayList
import omero.gateway.Gateway
import omero.gateway.LoginCredentials
import omero.gateway.SecurityContext
import omero.gateway.facility.BrowseFacility
import omero.gateway.facility.ROIFacility
import omero.gateway.model.EllipseData
import omero.gateway.model.PolylineData
import omero.gateway.model.ROIData
import omero.log.SimpleLogger
import omero.model.PolylineI
import static omero.rtypes.rstring
import ij.IJ
import fiji.plugin.trackmate.Spot
import fiji.plugin.trackmate.Settings
import fiji.plugin.trackmate.Model
import fiji.plugin.trackmate.SelectionModel
import fiji.plugin.trackmate.TrackMate
import fiji.plugin.trackmate.detection.DetectorKeys
import fiji.plugin.trackmate.detection.DogDetectorFactory
import fiji.plugin.trackmate.tracking.sparselap.SparseLAPTrackerFactory
import fiji.plugin.trackmate.tracking.LAPUtils
import fiji.plugin.trackmate.visualization.hyperstack.HyperStackDisplayer
import fiji.plugin.trackmate.features.spot.SpotContrastAndSNRAnalyzerFactory
import fiji.plugin.trackmate.features.spot.SpotIntensityAnalyzerFactory
import fiji.plugin.trackmate.features.track.TrackSpeedStatisticsAnalyzer
Connect to the server. It is also important to close the connection again
to clear up potential resources held on the server. This is done in the
disconnect method:
def connect_to_omero() {
"Connect to OMERO"
credentials = new LoginCredentials()
credentials.getServer().setHostname(HOST)
credentials.getUser().setUsername(USERNAME.trim())
credentials.getUser().setPassword(PASSWORD.trim())
simpleLogger = new SimpleLogger()
gateway = new Gateway(simpleLogger)
gateway.connect(credentials)
return gateway
}
def disconnect(gateway) {
gateway.disconnect()
}
Load the image from the server:
def get_image(gateway, image_id) {
"Retrieve the image"
browse = gateway.getFacility(BrowseFacility)
user = gateway.getLoggedInUser()
ctx = new SecurityContext(user.getGroupId())
return browse.getImage(ctx, image_id)
}
Read the binary data using Bio-Formats:
def open_image_plus(host, port, username, password, group_id, image_id) {
"Open the image using the Bio-Formats Importer"
StringBuilder options = new StringBuilder()
options.append("location=[OMERO] open=[omero:server=")
options.append(host)
options.append("\nuser=")
options.append(username.trim())
options.append("\nport=")
options.append(port)
options.append("\npass=")
options.append(password.trim())
options.append("\ngroupID=")
options.append(group_id)
options.append("\niid=")
options.append(image_id)
options.append("] ")
options.append("windowless=true view=Hyperstack ")
IJ.runPlugIn("loci.plugins.LociImporter", options.toString())
}
Create a tracking model using the TrackMate API:
def create_tracker(imp) {
"Create the trackmate model for the specified ImagePlus object"
// Instantiate model object
model = new Model()
// Prepare settings object
settings = new Settings()
settings.setFrom(imp)
// Configure detector
settings.detectorFactory = new DogDetectorFactory()
settings.detectorSettings.put(DetectorKeys.KEY_DO_SUBPIXEL_LOCALIZATION, true)
settings.detectorSettings.put(DetectorKeys.KEY_RADIUS, new Double(2.5))
settings.detectorSettings.put(DetectorKeys.KEY_TARGET_CHANNEL, 1)
settings.detectorSettings.put(DetectorKeys.KEY_THRESHOLD, new Double(5.0))
settings.detectorSettings.put(DetectorKeys.KEY_DO_MEDIAN_FILTERING, false)
// Configure tracker
settings.trackerFactory = new SparseLAPTrackerFactory()
settings.trackerSettings = LAPUtils.getDefaultLAPSettingsMap()
settings.trackerSettings['LINKING_MAX_DISTANCE'] = new Double(10.0)
settings.trackerSettings['GAP_CLOSING_MAX_DISTANCE'] = new Double(10.0)
settings.trackerSettings['MAX_FRAME_GAP'] = 3
// Add the analyzers for some spot features
settings.addSpotAnalyzerFactory(new SpotIntensityAnalyzerFactory())
settings.addSpotAnalyzerFactory(new SpotContrastAndSNRAnalyzerFactory())
// Add an analyzer for some track features, such as the track mean speed.
settings.addTrackAnalyzer(new TrackSpeedStatisticsAnalyzer())
settings.initialSpotFilterValue = 1
// Instantiate trackmate
trackmate = new TrackMate(model, settings)
ok = trackmate.checkInput()
if (!ok) {
print(str(trackmate.getErrorMessage()))
return null
}
ok = trackmate.process()
if (!ok) {
print(str(trackmate.getErrorMessage()))
return null
}
// Display the results on top of the image
selectionModel = new SelectionModel(model)
displayer = new HyperStackDisplayer(model, selectionModel, imp)
displayer.render()
displayer.refresh()
// The feature model, that stores edge and track features.
fm = model.getFeatureModel()
space_units = model.getSpaceUnits()
time_units = model.getTimeUnits()
return model
}
Convert the tracks into OMERO ROIs:
def convert_tracks(model, dx, dy) {
"Convert the tracks into OMERO objects"
rois = new ArrayList()
tracks = model.getTrackModel().trackIDs(true)
tracks.each() { track_id ->
track = model.getTrackModel().trackSpots(track_id)
roi = new ROIData()
rois.add(roi)
points = ""
track.each() { spot ->
sid = spot.ID()
// Fetch spot features directly from spot.
x = spot.getFeature('POSITION_X')/dx
y = spot.getFeature('POSITION_Y')/dy
r = spot.getFeature('RADIUS')
z = spot.getFeature('POSITION_Z')
t = spot.getFeature('FRAME')
// Save spot as Point in OMERO
ellipse = new EllipseData(x, y, r, r)
ellipse.setZ((int) z)
ellipse.setT((int) t)
// set trackmate track ID and spot ID for later
ellipse.setText(track_id+':'+sid)
// set a default color
settings = ellipse.getShapeSettings()
settings.setStroke(Color.RED)
roi.addShapeData(ellipse)
points = points + x + ',' + y + ' '
}
// Save the track
points = points.trim()
polyline = new PolylineI()
polyline.setPoints(rstring(points))
pl = new PolylineData(polyline)
// set a default color
settings = pl.getShapeSettings()
settings.setStroke(Color.YELLOW)
roi.addShapeData(pl)
}
return rois
}
Save the converted tracks back to the OMERO server:
def save_rois(gateway, rois, image_id) {
roi_facility = gateway.getFacility(ROIFacility)
user = gateway.getLoggedInUser()
ctx = new SecurityContext(user.getGroupId())
results = roi_facility.saveROIs(ctx, image_id, user.getId(), rois)
}
In order the use the methods implemented above in a proper standalone script, Wrap it all up:
gateway = connect_to_omero()
exp = gateway.getLoggedInUser()
group_id = exp.getGroupId()
image = get_image(gateway, image_id)
open_image_plus(HOST, PORT, USERNAME, PASSWORD, group_id, image_id)
imp = IJ.getImage()
dx = imp.getCalibration().pixelWidth
dy = imp.getCalibration().pixelHeight
trackmate_model = create_tracker(imp)
if (trackmate_model == null) {
print("unable to create the trackmate model")
} else {
omero_rois = convert_tracks(trackmate_model, dx, dy)
save_rois(gateway, omero_rois, image_id)
print("done")
}
disconnect(gateway)